 hide forever |
hide once
hide forever |
hide once
Fill and Transfer: A Simple Physics-based Approach for Containability Reasoning
Lap-Fai Yu1 |
Noah Duncan2 |
Sai-Kit Yeung3 |
1University of Massachusetts Boston |
2University of California, Los Angeles |
3Singapore University of Technology and Design |
 |
 |
 |
 |
(a) Which direction shall we tilt the
pitcher to pour the water out? |
(b) Shall we use this container to
hold water? |
(c) Which object is a good liquid container?
|
(d) Shall we use a plate or a cup to carry
water? |
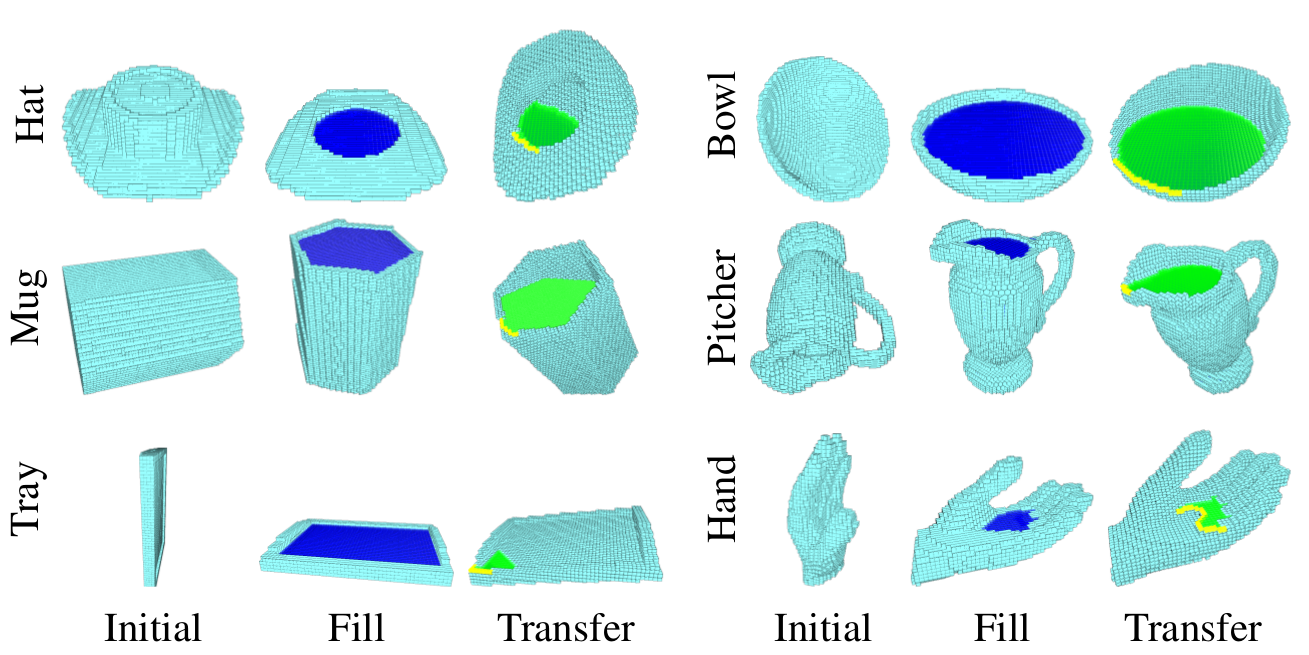
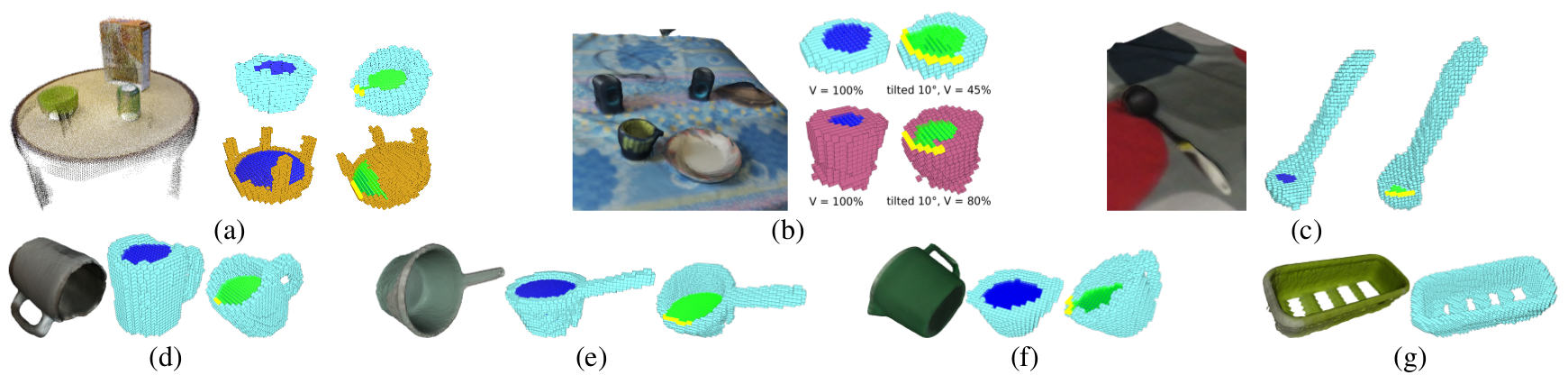
Abstract The visual perception of object affordances has emerged as a useful ingredient for building powerful computer vision and robotic applications [30]. In this paper we introduce a novel approach to reason about liquid containability - the affordance of containing liquid. Our approach analyzes container objects based on two simple physical processes: the Fill and Transfer of liquid. First, it reasons about whether a given 3D object is a liquid container and its best filling direction. Second, it proposes directions to transfer its contained liquid to the outside while avoiding spillage. We compare our simplified model with a common fluid dynamics simulation and demonstrate that our algorithm makes human-like choices about the best directions to fill containers and transfer liquid from them. We apply our approach to reason about the containability of several real-world objects acquired using a consumer-grade depth camera.
Keywords: functionality, physics-based reasoning, affordance, vision for graphics, robotics
Fill and Transfer: A Simple Physics-based Approach for Containability Reasoning
Lap-Fai Yu,
Noah Duncan,
Sai-Kit Yeung
IEEE International Conference on Computer Vision (ICCV), 2015
Paper, Video
@article{containability,
author = {Lap-Fai Yu and Noah Duncan and Sai-Kit Yeung},
title =
{Fill and Transfer: A Simple Physics-based Approach for Containability Reasoning},
booktitle = {IEEE International Conference on Computer Vision (ICCV)},
year = {2015}
}
We thank Michael Brown for narrating the video and William Koh for scanning the data. Sai-Kit Yeung is supported by SUTD-ZJU Collaboration Research Grant 2012 SUTDZJU/RES/03/2012, SUTD-MIT International Design Center Grant IDG31300106, and Singapore MOE Academic Research Fund MOE2013-T2-1-159. Part of the work was done when Noah was visiting SUTD and supported by Singapore MOE Academic Research Fund MOE2013-T2-1-159. We acknowledge the support of the SUTD Digital Manufacturing and Design (DManD) Centre which is supported by the Singapore National Research Foundation. Lap-Fai Yu is supported by the University of Massachusetts Boston StartUp Grant P20150000029280 and the Joseph P. Healey Research Grant Program provided by the Office of the Vice Provost for Research and Strategic Initiatives & Dean of Graduate Studies of the University of Massachusetts Boston.
 |
 |